Title
Date
Need
Within the testbed for heliostat facet alignment using reflection from a target, it is necessary to remotely control the zoom and focus parameters of a DSLR camera installed at a height exceeding 2 m. The camera lacks built-in remote adjustment capabilities, preventing these parameters from being modified during the image acquisitions required to evaluate optical deviations. This limitation can negatively impact the quality and accuracy of the images used to compare the captured real image with the theoretical image generated by the optical model, thereby reducing the sensitivity of detecting canting and focus alignment errors in the heliostat mirrors. The proposed solution involves implementing a system that enables dynamic remote adjustment of the camera’s zoom and focus, ensuring robust and repeatable image acquisition throughout the alignment process.
Purpose
Design a minimal-intervention mechanical system that enables the safe and straightforward removal and repositioning of the camera, while integrating a zoom and focus control mechanism. The system shall be autonomous and battery-powered, in order to avoid additional cabling that could interfere with the installation, testbed operation, or measurement conditions.
Requirements
The system shall enable remote adjustment of the DSLR camera’s zoom and focus.
The mechanical design shall be as non-invasive as possible and shall not require permanent modifications to the camera.
The system shall allow for easy removal and repositioning of the camera while preserving optical alignment.
The assembly shall be battery-powered, avoiding the use of external cabling.
The system shall provide sufficient mechanical stiffness to prevent vibrations during image acquisition.
Implemented Solution
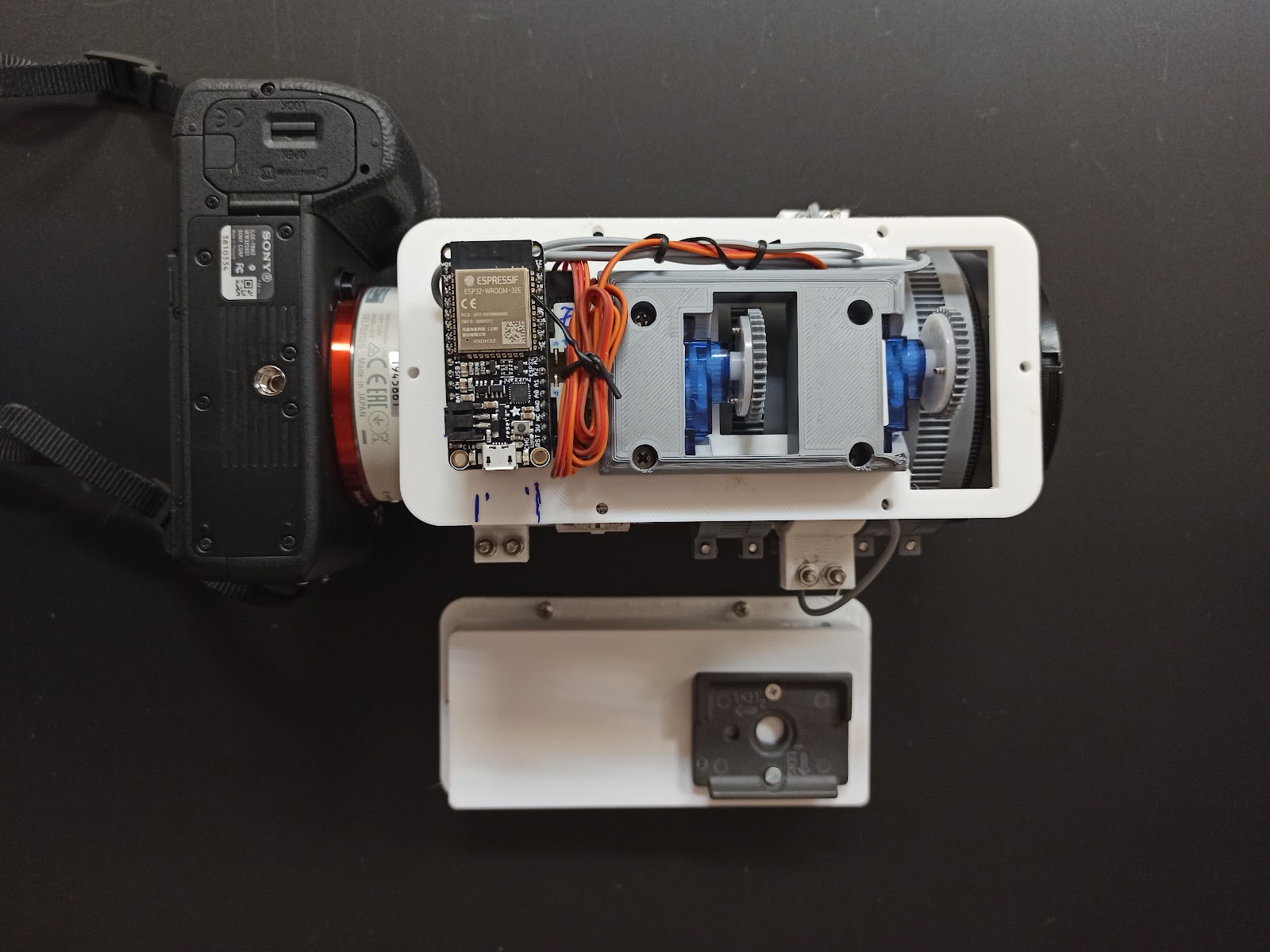
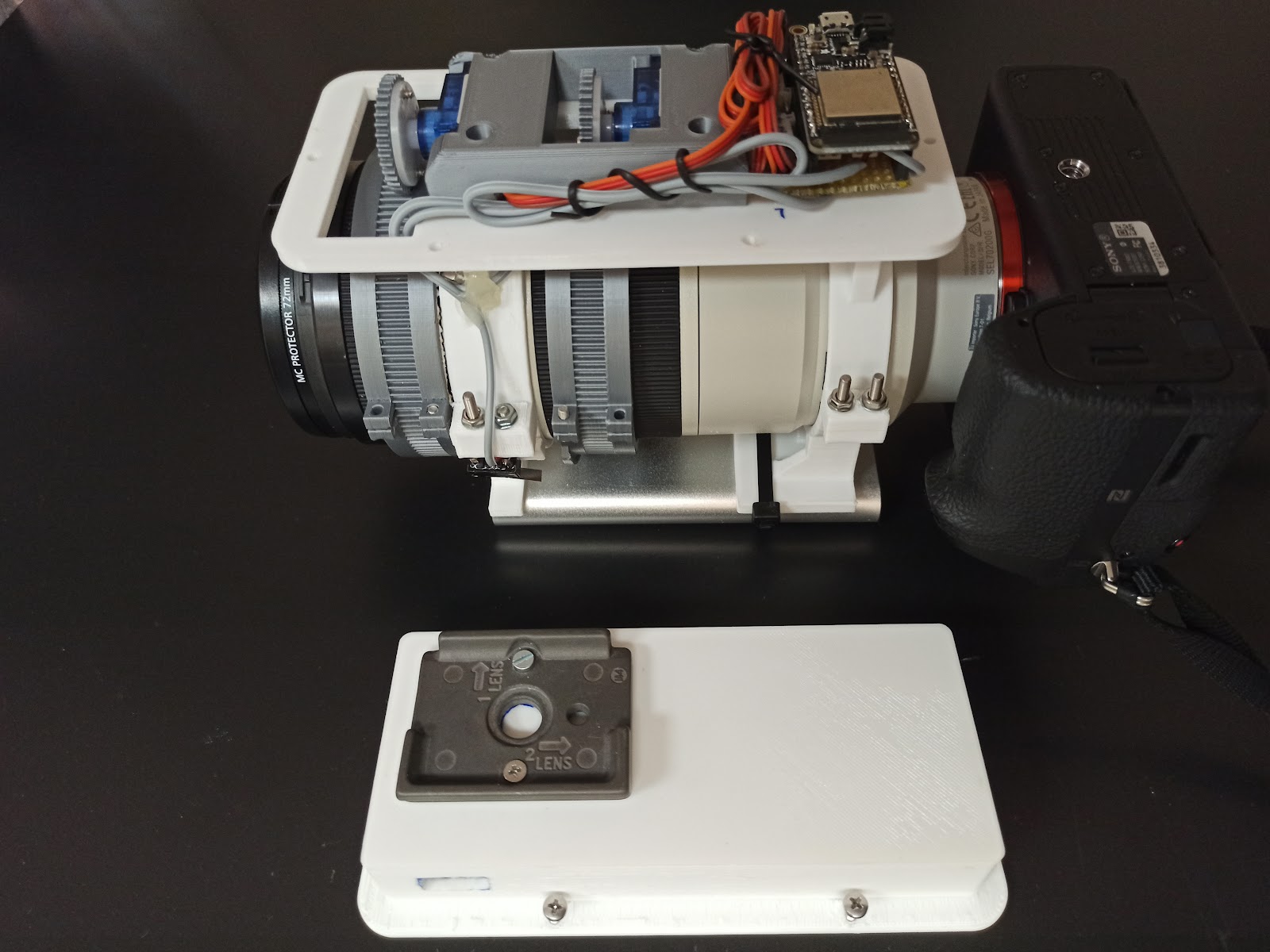
The implemented solution is based on an ESP8266 evaluation board, two hobby-grade servo motors, and a mechanical structure composed of geared components that act as independent transmission systems for the zoom and focus rings.
In the prototype, power is supplied by a 20,000 mAh power bank. Servo motor control is achieved using the MCU’s internal timer to generate the required PWM signals.
{kind=link}
{kind=link}
{kind=link}