Título
Fecha
Necesidad
En el contexto del testbed para la alineación de facetas de heliostatos mediante reflexión de un objetivo (target), se requiere controlar de forma remota los parámetros de zoom y enfoque de una cámara réflex situada a más de 2 m de altura. La cámara no dispone de capacidad de ajuste remoto integrado, lo que impide modificar estos parámetros durante las capturas necesarias para evaluar desviaciones ópticas. Esta limitación puede afectar negativamente la calidad y precisión de las imágenes utilizadas en la comparación entre la imagen real capturada y la imagen teórica generada por el modelo óptico, reduciendo la sensibilidad de la detección de errores de alineación de canting y enfoque en los espejos del heliostato. La solución pasa por un sistema que permita ajustar dinámicamente el zoom y el enfoque de la cámara desde una posición remota para asegurar una adquisición de imágenes robusta y repetible en el proceso de alineación
Objetivo
Diseñar un sistema mecánico de intervención mínima que permita la extracción y reposicionamiento de la cámara de forma sencilla y segura, integrando un mecanismo de control de zoom y enfoque. El sistema deberá ser autónomo, alimentado por batería, con el fin de evitar el uso de cableado adicional que pueda interferir con la instalación, la operativa del testbed o las condiciones de medida.
Requisitos
El sistema deberá permitir el ajuste remoto del zoom y del enfoque de la cámara réflex.
El diseño mecánico deberá ser lo menos invasivo posible y no requerir modificaciones permanentes en la cámara.
El sistema deberá permitir la extracción y reposicionamiento de la cámara de forma sencilla, manteniendo la alineación óptica.
El conjunto deberá ser alimentado por batería, evitando el uso de cableado externo.
El sistema deberá garantizar rigidez mecánica suficiente para evitar vibraciones durante la adquisición de imágenes.
Solución aplicada
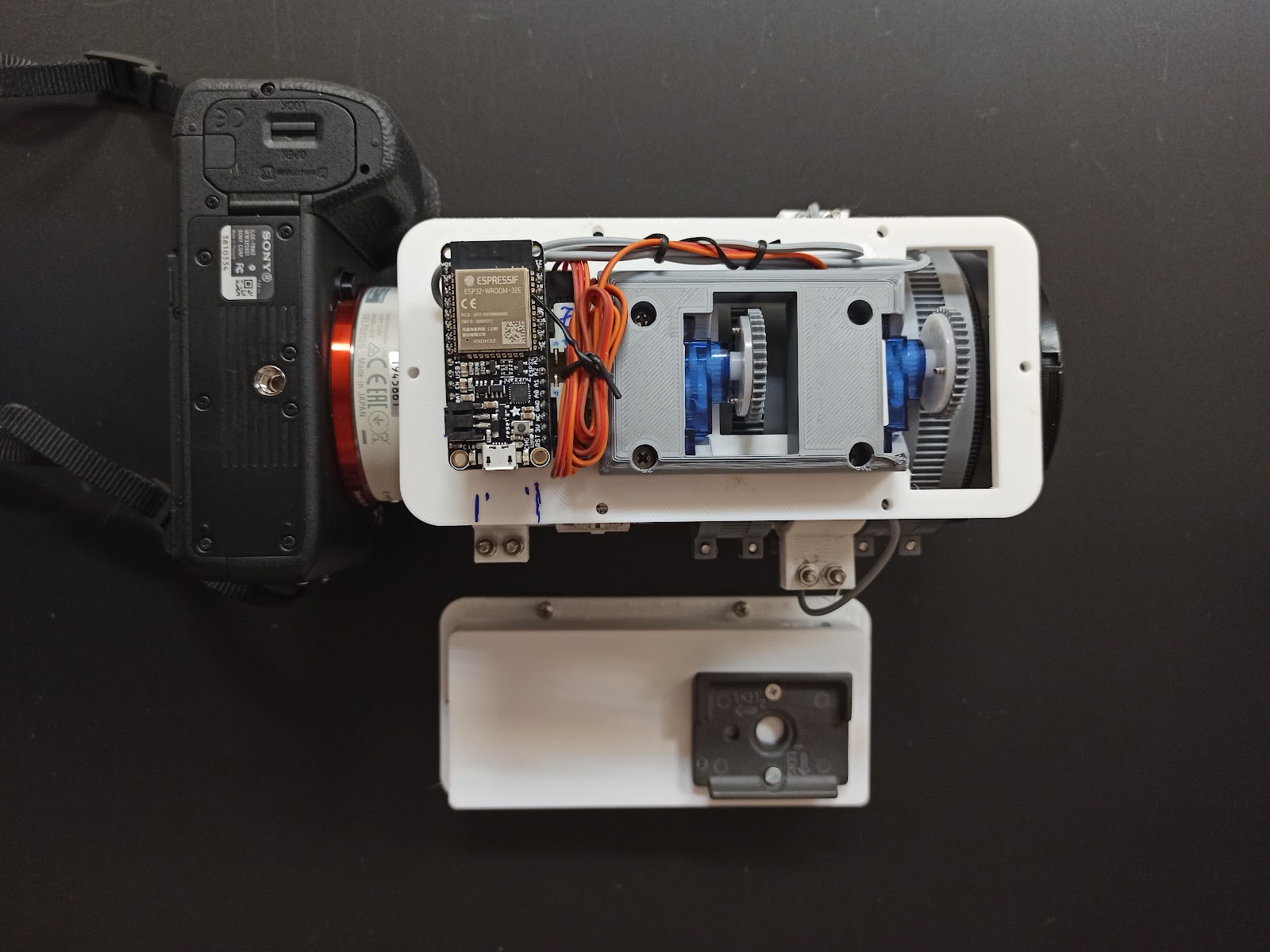
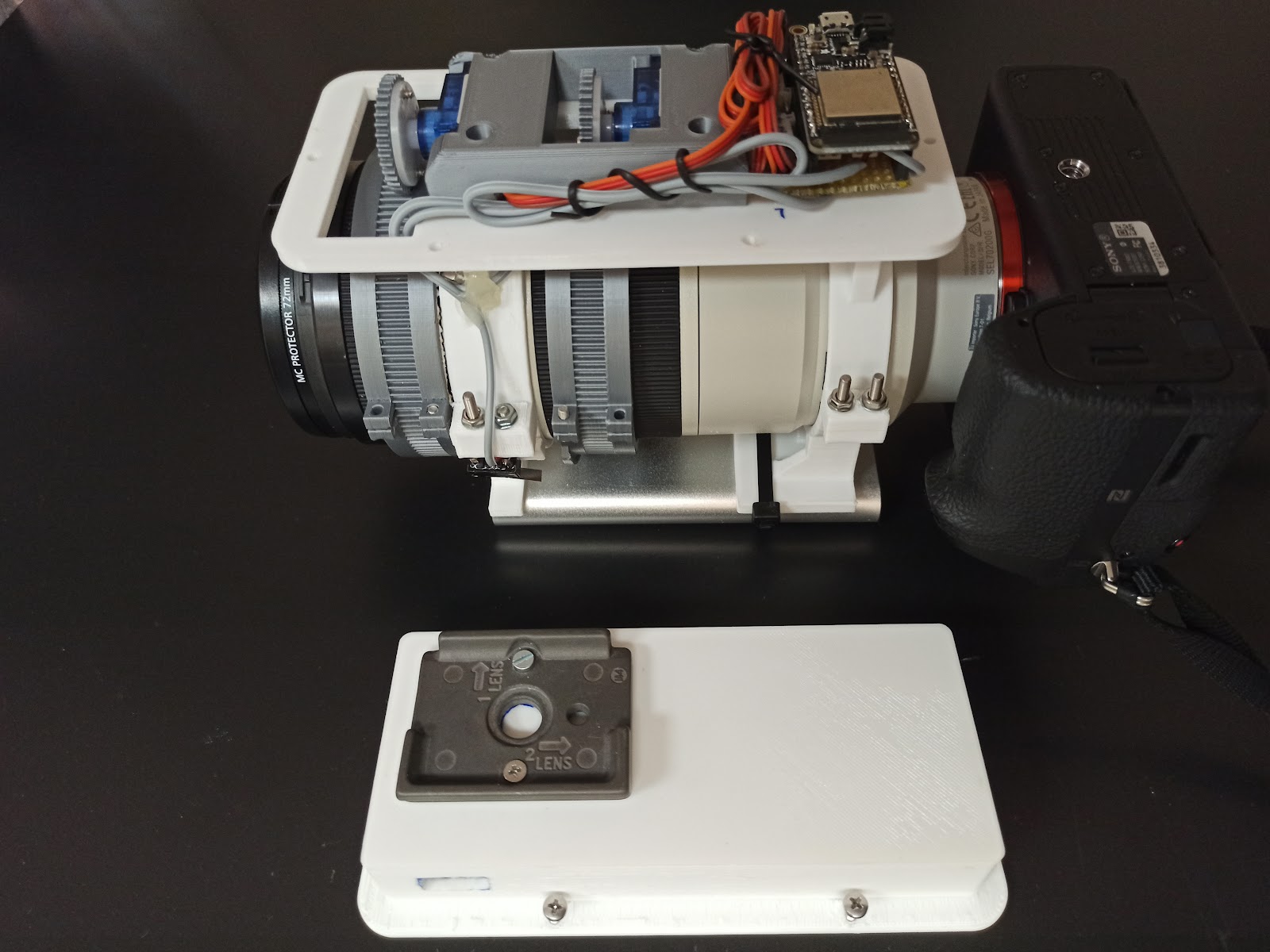
La solución implementada se basa en una placa de evaluación ESP8266, dos servomotores de modelismo y una estructura mecánica compuesta por piezas dentadas que actúan como transmisiones independientes para los anillos de zoom y enfoque.
{kind=link}
{kind=link}
{kind=link}